More pictures. (Auto focus was Off sorry) THANKS RICK for the help. The winch bolt holes were off a bunch. The fog lights are a bit to bright. Found this set with lower lumen (1200/1568) then the ridged ones hoping they would make good driving / fog light. Ordered some 15 deg spacers that should put the light down in front of the truck and not into oncoming traffic.
 www.desertrat.com/products/?id=8960powersports.rigidindustries.com/led-lighting/21211
www.desertrat.com/products/?id=8960powersports.rigidindustries.com/led-lighting/21211
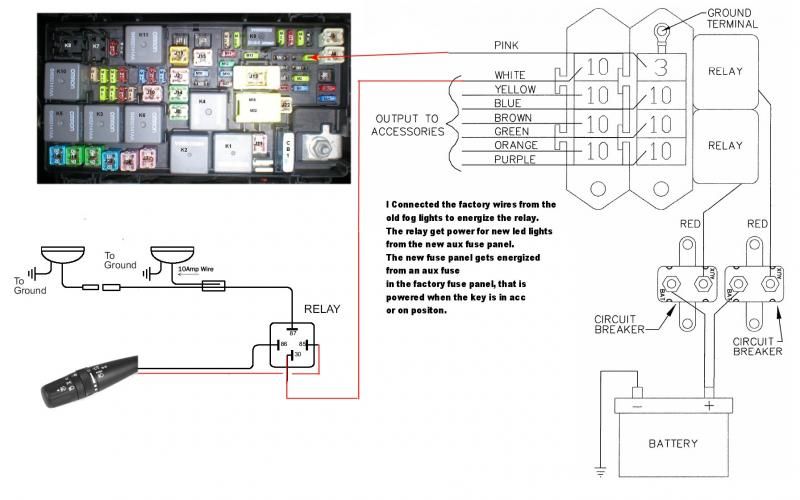
Also wiring aftermarket led lights to the factory harness is a little different on the JK. The canbus link does not like the low amperage of the leds. I had the painless circuit boss lying around for a while thinking I would add something to the JK.



This is a good explanation of the Canbus, Its the same technology that Trane has used on chillers for a while and is going to on all commercial equipment in the future.
CAN = Controller Area Network. It's a two wire (sometimes a 3rd shielding wire is used) communications link between control modules. Think of it as the link between your computer and your router/modem at home. All the CAN link does is allow modules to pass information back and fourth ie: vehicle speed, engine coolant temp, throttle position, switch states and so on.
The CAN Link (or CANBUS) is dumb, it doesn't know anything or do anything on it's own. It's vital to the operation of your JK because it's how modules get data from one another, which is why it can cause a whole host of problems if the wires get damaged or one module goes down.
All the inputs and outputs in your JK are controlled by the various modules (not the CAN link itself); TIPM, Cluster, Steering Control, Radio, PCM, Keyless Entry, Occupant Classification Module, ABS and so on.... You have three CAN links, all monitored by the TIPM (the TIPM acts as sort of a gateway). You have the diagnostic link that goes only to the TIPM and the DLC under the dash. Then there is an "interior" link that connects to the cluster and the radio and the non critical modules. Then there is the main link that connects between the TIPM, PCM and safety modules.
Maybe now is a good time for an example. I'll use the headlight/fog light circuit since it seems to be the most talked about.
The headlights and fog lights are not directly controlled by the CAN link. Yes the CAN link plays an important role but all it does is transmit switch state.
Your multifunction switch is part of the Steering Control Module. The Steering Control Module monitors the switch position and communicates that position to the Cluster via the LIN BUS (another simpler communications network). The Cluster then communicates that position to the TIPM over the CAN link. The TIPM then decodes the switch state from the message and makes a decision about what to do. The TIPM then controls the headlights via driver circuits (transistors for the most part). These circuits have the ability to monitor current and protect the circuit by disabling the drivers. This is why there is no fuse for the headlights or fog lights. This is also why trying to run a higher wattage bulb does not work (without a relay), the system detects too much current and disables the circuit.
In the end, all your inputs and outputs are controlled by a computer module and the module uses the CAN link to share that information. Why make it so complicated? There are a lot of reasons to start with it allows for multiple modules to share inputs without having to run multiple wires (and without having to have multiple inputs - this makes controllers cheaper), more precise control, better diagnosis and better diagnostic control via a service tool for troubleshooting. Is all this necessary for a wrangler? Probably not but I am sure it allows for a lot of cross platform carry over and reduces engineering/manufacturing costs.
Different modules broadcast different periodic messages. The reason you get into trouble removing something from the link is because there are other modules expecting that message and diagnosing it. And in the case of removing the cluster, the TIPM doesn't know when to turn the headlights on.

How to hack your canbus HAHA
fabiobaltieri.com/2013/07/23/hacking-into-a-vehicle-can-bus-toyothack-and-socketcan/











